
据外媒New Atlas报道,虽然水母可能不是海洋中游得最快的动物,但它们确实以“节能”的方式游泳 。中国科学家通过复制这一点创造了一种水母机器人,有朝一日将可以自主探索海洋深处。
真正的水母通过“喷气推进”游动,扩展和收缩它们的钟形体以将水推向它们后面。虽然我们之前已经看到模拟这种技术的水下机器人,但大多数都必须连接到位于表面的电源或控制系统。中国科学院的研究人员决定解决这个问题,设计一种自由游泳的水母机器人。
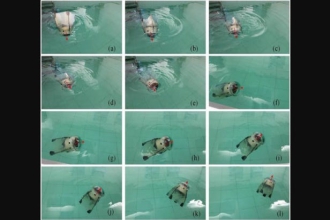
该模型以大型海月水母(Aurelia aurita)为模型,其具有钟形刚性头部和下方的圆柱形水母体。后者覆盖在呈伞状的膜中,并包含四个独立的“六杆连杆机构”。
通过弯曲和拉直这些“机构”来实现向前运动,导致身体在伸展和收缩时将水推出。另外,通过移动位于其体腔中的两个“砝码”,机器人能够在垂直和水平方向上转向。
科学家们现在正在开发基于强化学习的软件,这将使设备能够了解哪些运动会导致方向的变化。在各种车载传感器的帮助下,机器人可以沿着给定的路线穿过水面,同时避开障碍物,无需任何人为控制。它甚至可以携带小型有效载荷,例如环境传感器等。
免责声明:本文由用户投稿,(图文、音视频)均由用户自行上传分享,文章内容不代表本站立场,本站不对其内容的真实性、完整性、准确性给予任何担保、暗示和承诺,仅供读者参考,文章版权归原作者所有。若您的权利被侵害,请联系本站在线客服进行删除。